Небольшой бонус (челендж) для тех, кто понимает.
Timur.Idiatullov — вс, 09/10/2022 - 15:28
Те, кто уже порядком поднаторел в езде по линии и "по стенке" на роботах с дифференциальным шасси, ну и просто желающим получить новый вызов в типовых задачах логистической робототехники, стоит попробовать пройти ну "очень простое, совершенно базовое" задание. Всего-то "сгонять туда и обратно".
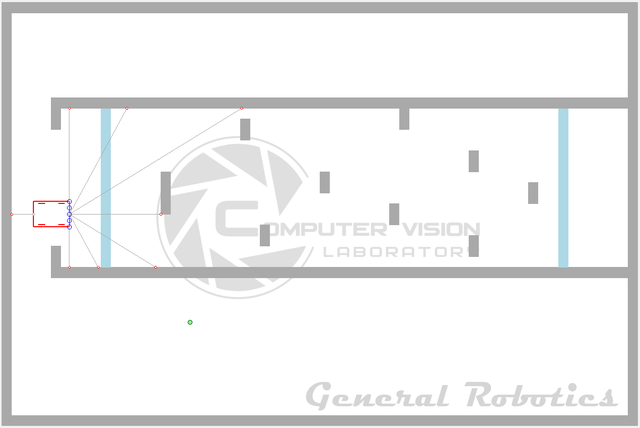
Перед стартом извлеките файл с лабиринтом из архива и поместите в папку симулятора.
Перед запуском симуляции выберите стартовую позицию переместив робота в "Shortrace Position" (позиция короткой гонки) и нажав "Submit".
Удачи в испытании!
P.S. Помните, что особенно почётно проехать путь туда и обратно по правой (относительно курса робота) стороне.
А в зоне разворота (за правой линией) нужно хотя бы небольшой участок проехать задним ходом. Причем вся "машина" должна быть именно за линией.
Labyrinth.zip (220 байт - в архиве только текстовый файл с картой)
- Войдите на сайт для отправки комментариев