Лидаров хотите? Их есть у нас, вчера завезли. И датчиков линии тоже подсыпали...
Timur.Idiatullov — вс, 09/10/2022 - 14:38
Иногда очень-очень хочется попробовать алгоритмы вроде IRRT*, построить цифровую модель дороги или вспомнить былое (например, "Робокросс" или "АвтоНет 18+"). Ну теперь это можно сделать и с симулятором IoTRobotWorld. Конечно, компьютерное зрение пока недоступно, но что-то вроде упрощенного лидара есть. Как и массив датчиков линий.
В симулятор добавлены два новых режима - отображение датчиков линии (сама детекция линии была уже в прошлом обновлении), а также новая конфигурация робота - с установленным в переднем бампере лидаром.
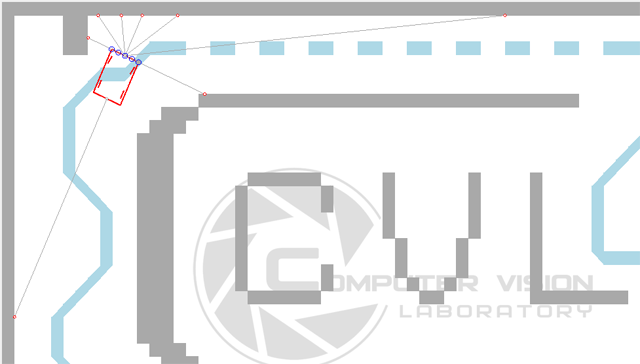
Фактически, это тот же старый-добрый-робокар, но 7 из 8 лазерных дальномеров установлены по центру переднего бампера и направлены веером в переднюю полуплоскость. Отсчет идет по часовой стрелке.
Восьмой луч уходит назад из заднего бампера. Ну а вдруг вы захотите ехать назад?
Отображение датчиков линии, а вместе с ними и возможность рисовать "скошенные" линии позволяет увидеть, как срабатывают датчики. Датчики нумеруются не подряд, а в соответствии с востребованностью в разных алгоритмах. Схема следующая - ( 3, 1, 0, 2, 4 ), если смотреть сверху.
Данные дальномеров присылаются в параметрах d0 .. d7, данные датчиков линии - l0 .. l4.
Кстати, слева внизу панели управления симуляцией доступна кнопка "ReLoad Labyrinth, которая заново считывает конфигурацию полигона из файла Labyrinth.txt. Ей удобно воспользоваться, если вы отредактировали файл с картой и хотите посмотреть, что получилось.
И пару слов насчет "езды по линии". Линия на карте задается указанием в файле карты цифр 5 (полная клетка), 6 (поворот направо), 7 (поворот налево) и обратные к ним 8 и 9. В симуляторе линия обозначается голубым цветом.
При этом коды 1 - 4 остаются "специальными" кодами, которые можно использовать со смарт-камерой. Впрочем, клетки с "линией" смарт-камера тоже считывает.
В общем, успешных заездов!
Скачать текущую версию: IoTRobotWorld2 (330 кб)
- Войдите на сайт для отправки комментариев