Изучаем Studica MXP-MD1 Motor Adapter for myRIO
Timur.Idiatullov — вт, 14/02/2017 - 14:35
В предыдущей статье была приведена информация по мотор-адаптеру компании Студика, которая, хоть и была взята с официального сайта, оказалось неверной.
Как оказалось, описание расходится с реальной конструкцией платы.
Считаю нужным исправить данную несправедливость. Читайте обновлённую версию!
Почти три года без всяких проблем "Мобильные робототехники" использовали для подключения моторов Digilent Motor Adapter for NI myRIO. Это была стабильная, надёжная плата, которая, правда занимая целую кучу линий MXP разъема, обеспечивала приемлемую работы с моторами Tetrix (входящие в WorldSkills Mobile Robotics Collection 2016).
Программы написаны, алгоритмы отработаны, все счастливы.
И вдруг без предварительного анонса Студика стала вкладывать в наборы мотор-адаптеры собственной разработки. Причём на сайте ещё не было информации или примеров, а платы уже рассылались. И, конечно, они не работали со старыми программами...
Материалы стали появляться только ближе к самому концу года. Копайте отсюда, если что.
Попробуем разобраться, с чем придётся работать.
Studica WS MXP-MD1 Motor Driver Adapter for NI myRIO
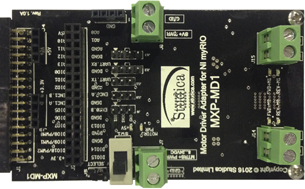
Плата мотор-адаптера выполнена в неожиданном чёрном цвете в формате платы расширения для порта MXP myRIO, которая устанавливается прямо в разъем A или B. При этом и контроллер, и две платы удобно размещаются на специальной монтажной панели, входящей в состав конструктора.

Адаптер выполнен на базе драйвера ST L6205PD. Не самый лучший выбор, поскольку рабочий ток - до 4 ампер (предельный 5.6А, а защита срабатывает на 7А) - это уровень маленьких роботов, таких как для Hello!Robot Arduino, например.
А типичный робот для мобильной робототехники может иметь массу более 10 кг.
Чтобы было проще разобраться с тем, как работает мотор-адаптер, я нарисовал схему передачи сигналов на плате.

Из неё, например, можно увидеть, что мощность "нулевого" мотора управляется DIO8. При этом пара выходов DIO5 и DIO6 устанавливает режим работы (направление вращения и торможение). Подав на один из входов 1, а на другой 0 вы получите вращение в одну сторону, а поменяв значения - в другую сторону. При этом подача 0 на оба управляющих выхода при включённой "тяге" активирует режим торможения двигателем.
Описание мотор-адаптера содержит указание на то, что генерация ШИМ (PWM) должна выполняться с частотой 1000 Гц (1 кГц).
В дополнение к линиям сигналов, на разъём Probe на данной схеме нанесены цветовые отметки. В них можно потыкаться мультиметром или осциллографом, чтобы понять, что происходит.
К сожалению, как и в случае с Digilent Motor Adapter, из двух распаянных на плате 4-х штырьковых разъемов для энкодеров, при использовании стоковой прошивки myRIO, работает только один. Второй можно обрабатывать программно, либо модифицировать прошивку микроконтроллера. Мы обязательно займёмся этим позднее.
А пока можно использовать по одному энкодеру с платы. Для дифференциального шасси этого будет достаточно.
- Войдите на сайт для отправки комментариев