Урок № 1. Управляем моторами с myRIO
Timur.Idiatullov — ср, 07/12/2016 - 21:15
Если вы всё же решились заняться разработкой робота для компетенции "Мобильная робототехника" WSR и у вас уже есть робототехнический конструктор от Studica, то традиционно вторым вопросом будет: "Ну вот, железку я собрал, как теперь заставить ЭТО двигаться?"
Попробуем решить эту задачу.
Основной программируемый модуль, допустимый к использованию при создании роботов в соответствии с заданием тестового проекта компетенции "Мобильная робототехника" WorldSkills в 2016-2017 годах - это многоцелевой блок управления myRIO от компании National Instruments. Традиционно, для его программирования используется среда разработки LabView той же компании, но с установленным дополнительным модулем LabView for myRIO.
Рекомендуем вам также установить модули для работы с техническим зрением. Они понадобятся позднее.
Установке программного обеспечения, подключению и настройке myRIO будет посвящена отдельная статья. А сейчас будем считать, что всё уже готово.
Итак, для выполнения следующих заданий необходимо иметь:
- Ноутбук или настольный компьютер с программным обеспечением LabView;
- Модуль myRIO с блоком питания или подключённым к аккумуляторной батарее;
- Активированное соединение компьютера с модулем myRIO по USB-кабелю или WiFi;
- Плату драйвера моторов (NI зовёт их адаптерами) Digilent Motor Adapter (аналог от Studica будет рассмотрен отдельно);
- Батарею для питания моторов, лучше не ту, что питает сам myRIO;
- Пару DC-моторов (ходовых) Tetrix или близких по характеристикам.
Подключаем моторы согласно схеме на рисунке:
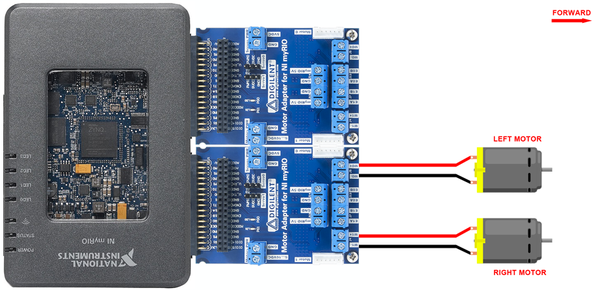
Надеюсь, что с подключением батареи к клеммам платы драйвера проблем не возникло (на схеме не указано как это сделать). Затем вставляем платы в подходящие разъемы MXP myRIO.
Неплохой идеей является установка на оси моторов колёс с нанесенными на них отметками положения. Например, можно наклеить цветную изоленту на один из роликов onmi-колеса.
ВНИМАНИЕ!
Крайне желательно перед продолжением закрепить моторы или, если они уже установлены на робота, вывесить колёса, установив робота на подставку!
Начинаем программировать!
Открываем LabView и создаем новый проект для myRIO.
- Войдите на сайт для отправки комментариев